自動走行ブラストロボットを実橋で試験施工 1㎡2分で施工可能



概要動画Overview Video
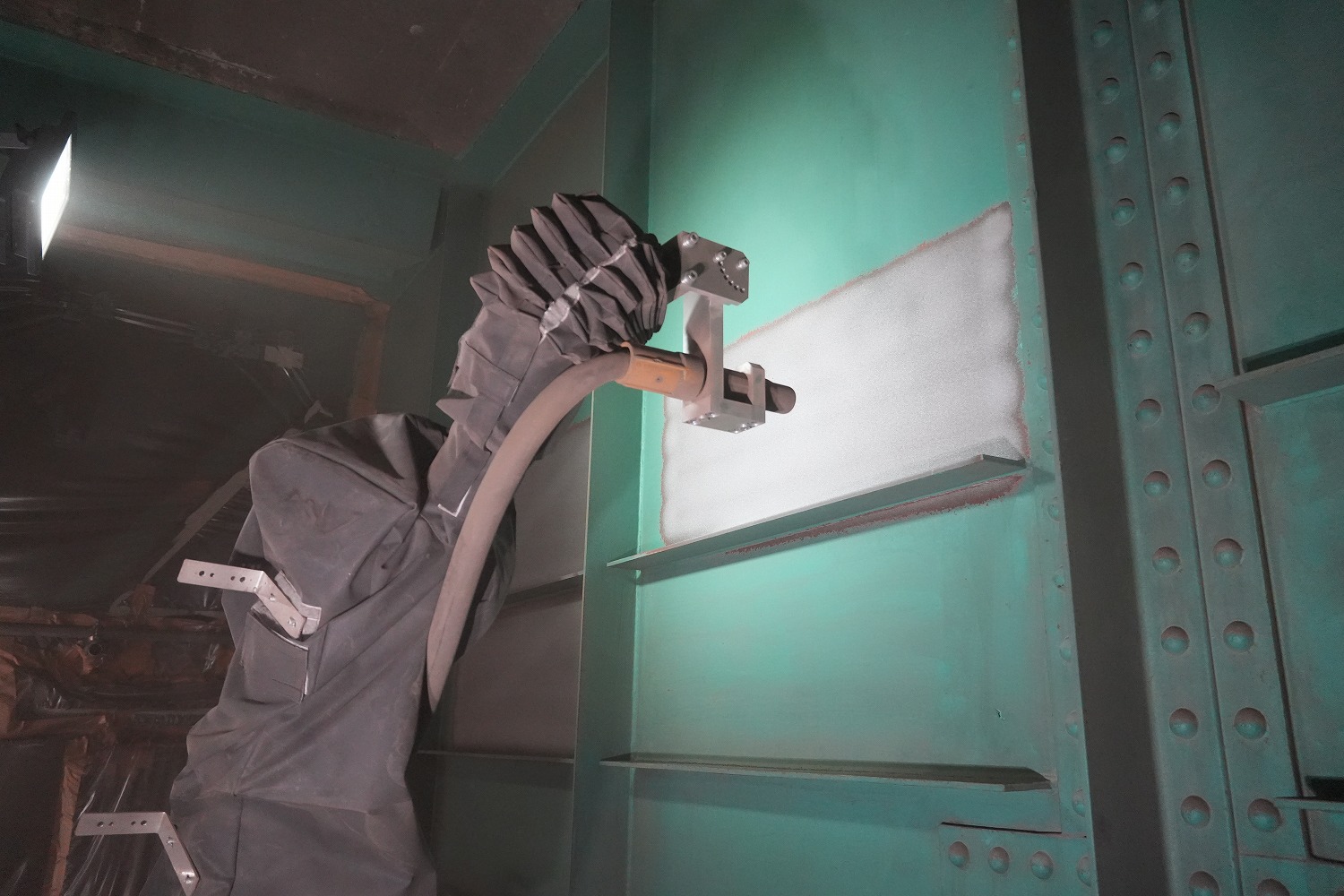
日本鋼構造物循環式ブラスト技術協会は、NEXCO西日本所管の近畿自動車道淀川橋において自動走行ブラストロボットの試験施工を行った。同ロボットは鋼橋の塗替塗装の際の塗膜除去及びブラストを1㎡/2分で施工でき、さらにブラストの素地調整の品質を「Sa3.0を目標値とすることで、少なくとも1種ケレンの要求性能である同2.5を確実に達成できるようにしている」(同協会)。さらにブラスト設備は、加圧式タンクを採用せずロータリーバルブを活用した連続供給式ブラストタンクを使っているため、吐出量にむらがなくブラストを施工することが可能である為、通常のブラスト設備では、ロボット稼働中に吐出量が変化した場合は品質にばらつきが出るが、本工法については、品質が安定する。従って、素地調整の品質を保ちつつ8時間連続使用することが可能である。足回りはクローラーを採用しており、グリッドや塗膜片などが足元にあってもバランスを崩すことなく移動でき、さらにはレベリングを確保して施工できる。ロボットを主桁間の中央におけば橋軸方向に移動しながら、両側の桁を自動施工することが可能である。同協会ではロボットにウエブや上下フランジ面などの施工可能な部分を自動施工させ、さらに添接部やスカラップなどの狭隘部においては、人力で後追い施工を実施する。ロボットと人の共同作業で現場の安全性向上、省人化、省力化を図っていく考えだ。(井手迫瑞樹、写真、動画も同)




同じ姿勢で左右、上下に動いても疲れ知らず
塗替え工事の劣悪な現場環境、職人不足への対応と品質のさらなる向上が目的
同じ姿勢で左右、上下に動いても疲れ知らず
同ロボット開発の動機は、塗装塗替え現場の劣悪な現場環境、職人不足への対応と品質のさらなる向上を目的とした。橋長が長く、桁高が高い現場では足場段数も多く必要になり、さらには広い面積を施工する必要があるが、ブラスト施工時の足場内は、もうもうと粉塵が舞い、品質の目視による確認はとてもし難い。ブラストノズルは重く、施工時の反力も強く、これを人力で同じ姿勢を保ちつつ、素地調整の品質を確保するには、人手の確保、さらに施工者の練度の両面で大きな労力を必要としている。それに反してロボットは「同じ姿勢で左右、上下に動いても疲れ知らずで、セッティングさえすれば、後は自動施工して良好な品質を確保するため、職人の労力を大幅に軽減できる」(同協会)。


様々な姿勢で施工できる(動画も参照を推奨)

最大2.7mの高さまで施工可能
重量は200kg~120㎏、機械幅は800mm、使用する足場性能に対応
ロボットは重量約200kg~120㎏、幅約800mm×高さ1,000mm以下で、下からクローラー、リフター、先端にノズルのついた6軸のロボットから構成されている。それぞれの部材のジョイント部には特殊なプレートが設けられており、それにより接続する。リフターを用いることで最大2.7mの高さまで施工可能となっている。またブラストに耐え得る特殊ジャケットを装着している。組み立て自体は15分程度しかかからず、基本的には足場下で組み上げた後、足場に設けた開口部から吊り上げ、足場内に搬入する。



機械全景(左)とノズル(中、右)
重量を200kg~120㎏とし、機械幅を800mmとしたのは、いずれも使用する足場(今回の現場で採用された足場の種類はクイックデッキ)の載荷可能な荷重と吊りチェーン間隔に対応したもの。桁高が低ければ、リフターが必要なくなるため、約120kgまで軽くできる。また、リフターの分、低くなるため、対傾構や下横構などの障害物があっても潜って次の対象個所へ自動移動できる。
火災対策などにも配慮しており、クローラーとリフターはバッテリーで稼働、ブラストロボットは200Vの優先で電力を供給している。
1回あたり縦400mm、横1,000mmの範囲を施工
ノズル噴射角を自由に変更できることなどの改善も図る
その後は初めに施工対象となるエリアのティーチング(プログラミング)を行い、それに従って1回あたり縦400mm、横1,000mmの範囲を施工することを繰り返していく。


施工状況
同ロボットの施工をより効率的に進めていくためには、「ロボットを使うことを想定して足場を計画していくことが必要で、開口部の適切な配置を行うことで、機械の桁間移動などをスムーズに行うようにできれば、さらに施工効率の向上を期待できる」(同協会)としている
ロボットの構想は3年前から始まり、同協会のICT部会(ライブ・レット、川口スプリング製作所、湘南興業、ヤマダインフラテクノス)で試行錯誤を重ねてきた。小規模な実験は河口湖大橋(山梨県)でも1年前に行っており、より精度を高めた機械として、今回、淀川橋の渡河部にて試験施工を行っている。
今後は、主桁間が長くなっている橋梁における素地調整精度の向上を図るべく、アームの長さを調整したり、ノズルヘッドの耐久性向上塗膜除去および素地調整の精度のさらなる向上を図るため、ノズル噴射角(現在は90°のみ)を自由に変更できることなどの改善を図っていく。また現在のブラスト離隔50cm、ノズル径φ9mmといった仕様についても、ノズル形状を変更、ノズル径の変更、噴射圧力の変更など試行を凝らし、より効率的な施工をできるよう検討を進めていく方針だ。

 お問い合わせはこちら
お問い合わせはこちら