NEWSNEWS List
オリエンタル白石 四足歩行ロボットによる吊り足場での安定歩行試験に成功
工事現場の生産性向上とウェルビーイング実現に向けたロボットの適用性を評価
- Share
-



 オリエンタル白石株式会社(東京都江東区・大野達也社長)は、橋梁工事などで用いられる吊り足場上において、四足歩行ロボットによる自律巡回試験を10月に実施した。複雑な障害物配置や微細な段差が連続する環境で、ロボットが安定して自律歩行できることを確認し、今後はロボットの自動巡回、および巡回中の体調不良者検知などの実現を目指す。(右写真:ロボットが吊りチェーンの間を通る様子)
オリエンタル白石株式会社(東京都江東区・大野達也社長)は、橋梁工事などで用いられる吊り足場上において、四足歩行ロボットによる自律巡回試験を10月に実施した。複雑な障害物配置や微細な段差が連続する環境で、ロボットが安定して自律歩行できることを確認し、今後はロボットの自動巡回、および巡回中の体調不良者検知などの実現を目指す。(右写真:ロボットが吊りチェーンの間を通る様子)
橋梁や高架橋などの施工現場では、長大かつ高所に設置される吊り足場が不可欠だが、天井が低く、床材継ぎ目による段差、さらに吊りチェーンやワイヤーの存在により視界が遮られやすい。こうした環境では、定点監視だけでは作業者の状態を把握し切れず、作業中の安全を確認する巡視が不可欠である。
本試験では、Unitree Robotics社製の四足歩行ロボット「Go2」に独自プログラムを搭載し、実際に稼働している工事現場で自律走行を行った。吊り足場全般の特徴として、一枚の大きな床材ではなく、細かい床材の集合であるため軽微な段差が多く存在すること、また床材と構造物を繋ぐチェーンやワイヤーなど、LiDARで検知しにくい障害物があることが課題であったが、従来LiDARで検知しにくかった細い吊りチェーンを障害物として正確に認識し、接触することなく自律歩行をすることに成功し、悪路での安定歩行も確認した。
開発担当者は「安全な自律歩行を実現することが最大の挑戦だった。特に吊りチェーンの検知には形状が細く認識が困難であり、設置間隔が狭いことから自律歩行は試行錯誤の連続であった」と振り返る。一方、現場担当者は「心のこもった『声掛け』や雰囲気をつかんだ鋭い『気づき』は人間にしかできないことだと思っているが、体調急変の早期検知などロボットが検知してくれるとより迅速な対応が取れる。将来、現場で『小さな相棒』と協働できることを楽しみにしている」と語り、実用化への期待を示した。
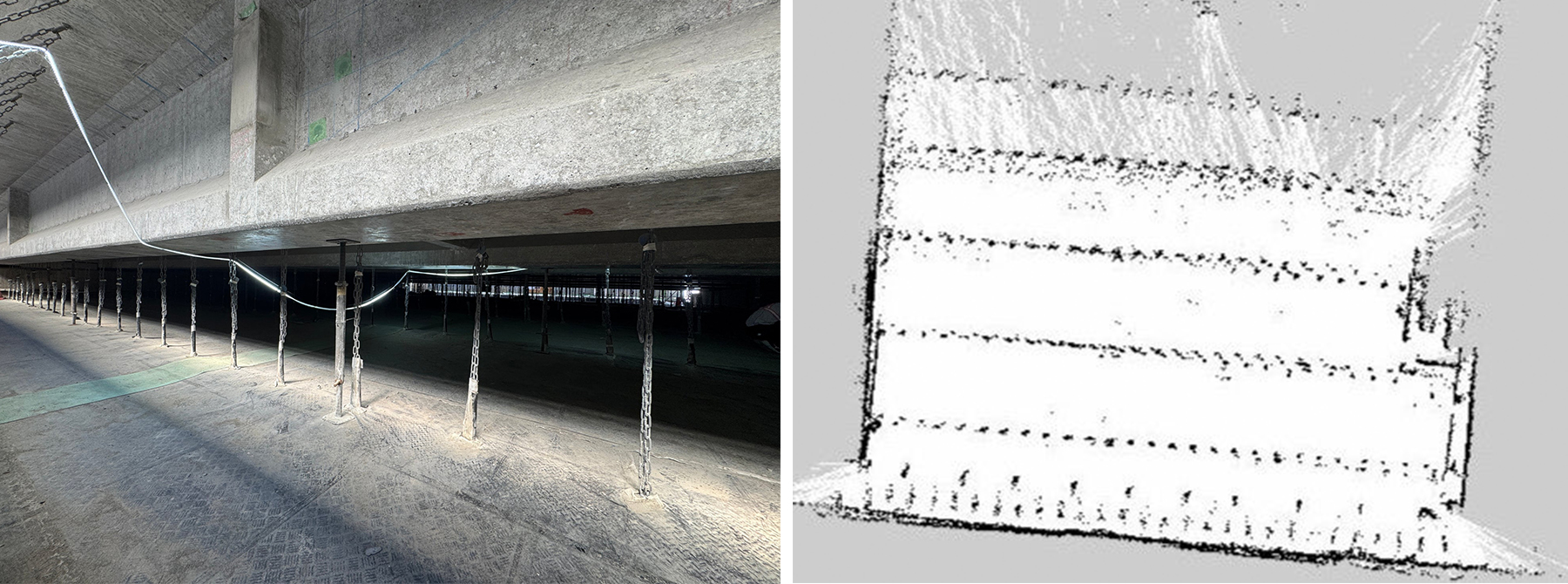 左:実証で使用した吊り足場環境、右:ロボットがLiDARで認識した環境
左:実証で使用した吊り足場環境、右:ロボットがLiDARで認識した環境
【使用ロボットの概要】機体名 :Go2(Unitree Robotics社)/寸法 :W 31cm×H 40cm×L 70cm/連続稼働時間 :約2時間

 お問い合わせはこちら
お問い合わせはこちら